 Return to the range
Return to the range 







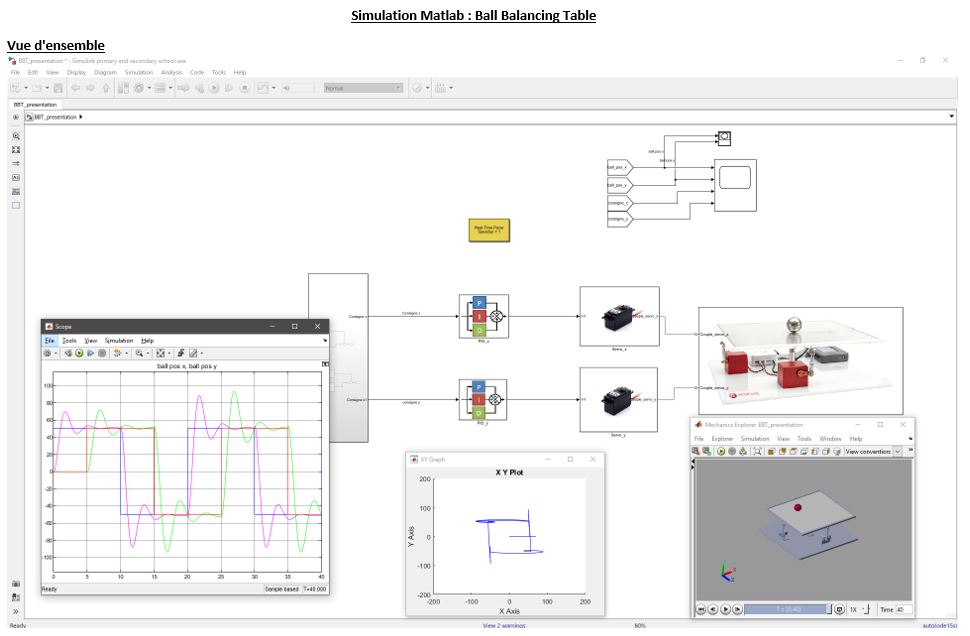















Ball Balancing Table
Ball balance control platform with 2 degrees of freedom
Doc. commercial Fr
 Ball Balancing Table
Ball Balancing TableVidéo
 FR - Ball Balancing Table
FR - Ball Balancing TableRelated ranges :
Ball balance control platform with 2 degrees of freedom
The Ball Balancing Table didactic platform allows students to approach the mains concepts of enslavement.
It is realized A ball is positioned on a touch table. It is stabilized by a two degrees of freedom mechanism associated with a control command.
Open Source applications allow students to create, modify and test their own algorithms.
Table with two degrees of freedom mounted on a central cardan shaft
Two analogue servomotors 4.8V and torque 0.5 Nm
Two connecting rod / crank mechanisms with ball joints coupled to the two servomotors and to the table.
A 17-inch 4-wire resistive touch table with vertical and horizontal grids
An electronic interface board between the operating part and the control boards (myRIO, Arduino and Raspberry)
Fully compatible with LabVIEW and MATLAB Simulink
Open Source software structure to customise the desired applications
Rectangular and circular trajectory complements are integrated into the software.
Functional and structural study of the "Ball Balancing Table" platform:
Study of pulse width modulation (PWM) :
System modeling :
Study of the feedback loop in systems :
Performance measurement :
Design of servo correctors :
Verification of control systems :
TP discovery :
TP initialisation :
TP Performance: Time identification (point function)
Step input response in X then Y
TP Performance: Time identification (rectangle function)
Response Step input in X and Y combined
TP Performances: Time identification (circle function)
Analysis and preparation of frequency studies
TP Performance: Frequency identification (closed-loop bode tracing)
Single-axis frequency survey" function
TP Performance: Frequency identification (closed-loop bode tracing)
Circle function
TP Performance: Frequency identification (open-loop bode tracing)
Identification and stability
TP Performances PID Tuning: PID Corrector Optimisation
TP Movement transmission study (circle function)
Geometrical laws transmission motor movement - table
TP Movement transmission study (circle function)
Geometrical laws of the ball table
TP Movement transmission study (circle function)
Motor-ball law
This list of assignments is subject to change.
Ball Balancing Table" tutorial table to learn the basics of enslavement.
User-selectable control part with programming under LabVIEW, MATLAB Simulink, Python.
Open source programs for creating your own control interfaces
Implementation of advanced numerical control/command techniques
AO03 : Ball Balacing Table without control command
AO01 : Control command with MyRIO
AO02 : Control command with Arduino Mega
AC//RPi3 : Command control with Raspberry Pi 3